


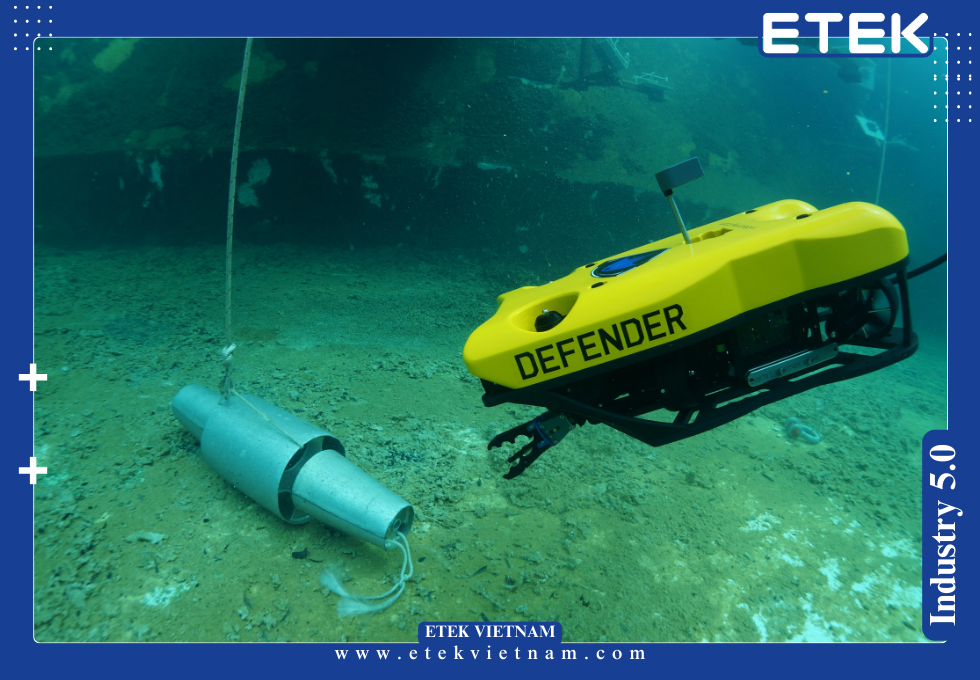

AMR DƯỚI NƯỚC
AMR dưới nước là công nghệ robot tự hành chuyên hoạt động trong môi trường ngập nước sâu. Nhờ tích hợp cảm biến hiện đại, hệ thống điều hướng không dây và khả năng vận hành liên tục, loại robot này đang thay đổi cách con người thực hiện khảo sát đáy biển, giám sát môi trường nước và bảo trì công trình ngầm.
Sản phẩm khác


1.1 Tổng quan về AMR dưới nước
AMR dưới nước (Autonomous Mobile Robot Underwater) là thế hệ robot AUV tiên tiến có khả năng tự di chuyển, nhận dạng địa hình, thu thập và truyền dữ liệu trong môi trường nước có áp suất cao.
Không cần điều khiển trực tiếp, hệ thống sử dụng thuật toán định vị kết hợp INS (Inertial Navigation System) và DVL (Doppler Velocity Log) để duy trì sai số vị trí dưới 0,2% quãng đường di chuyển.
Thiết bị có thể hoạt động ở độ sâu đến 6.000 m, phù hợp cho khảo sát đáy biển hoặc kiểm tra công trình ngầm trong điều kiện tầm nhìn kém.
1.2 Bối cảnh phát triển và nhu cầu công nghiệp
Trong ngành dầu khí, năng lượng và hạ tầng biển, nhu cầu giám sát định kỳ các tuyến ống ngầm, cáp điện và cấu trúc giàn khoan ngày càng tăng. Phương pháp truyền thống dựa vào thợ lặn tốn kém và rủi ro.
AMR dưới nước khắc phục hoàn toàn các hạn chế này nhờ vận hành tự động, có thể hoạt động liên tục 24–48 giờ, độ ổn định hướng < 0,1°, tiết kiệm đến 60% chi phí vận hành so với ROV điều khiển dây cáp.
1.3 Nguyên lý tự hành thông minh
Trung tâm điều khiển của robot AUV tích hợp CPU xử lý đa lõi ARM 64-bit, tốc độ 2,4 GHz, bộ nhớ 32 GB, cho phép xử lý đồng thời dữ liệu từ sonar, camera và cảm biến quán tính.
Nhờ AI tích hợp, AMR dưới nước tự động xây dựng bản đồ đáy biển (SLAM – Simultaneous Localization and Mapping), định vị theo waypoint, nhận dạng vật thể lạ hoặc khu vực hư hỏng.
Dữ liệu được truyền qua acoustic modem tốc độ 12 kbps, tầm xa 3 km, hoặc qua sóng vệ tinh khi nổi lên mặt nước.
1.4 Ưu điểm kỹ thuật so với ROV truyền thống
Khác với ROV (Remotely Operated Vehicle) phụ thuộc vào dây cáp và nguồn điện bề mặt, AMR dưới nước vận hành hoàn toàn độc lập, pin lithium-ion 20 kWh cho phép thời gian hoạt động 24–36 giờ.
Thiết bị có khả năng tự sạc qua dock dưới nước (underwater docking station), hỗ trợ nhiệm vụ dài ngày mà không cần con người can thiệp.
Hệ thống AI giúp nhận dạng đường ống, sinh vật biển, xác định vùng lắng cặn hoặc rò rỉ khí CH₄ với độ chính xác > 95%.
1.5 Vai trò trong chiến lược công nghiệp biển
Ứng dụng AMR dưới nước mang tính chiến lược cho các ngành:
- Dầu khí: kiểm tra rò rỉ, ăn mòn, đo địa hình đáy biển.
- Hạ tầng năng lượng: giám sát cáp ngầm điện gió, trạm chuyển đổi dưới biển.
- Quốc phòng: trinh sát, dò mìn, bảo vệ cảng biển.
- Môi trường: giám sát môi trường nước, phát hiện ô nhiễm và biến động sinh học.
Công nghệ này đang trở thành nền tảng cốt lõi trong mô hình “Ocean 4.0” – hướng tới hệ thống giám sát biển tự động hóa toàn diện.
1.6 Triển vọng phát triển tại Việt Nam
Với đường bờ biển hơn 3.260 km, Việt Nam là thị trường tiềm năng cho robot AUV. Các viện nghiên cứu và doanh nghiệp trong nước bắt đầu triển khai thử nghiệm thiết bị ở độ sâu 200–500 m, phục vụ khảo sát đáy biển và giám sát các khu vực san hô.
Sự xuất hiện của AMR dưới nước giúp giảm phụ thuộc vào thiết bị nhập khẩu, đồng thời mở ra cơ hội hợp tác quốc tế về công nghệ biển sâu, từ đó nâng cao năng lực tự chủ và quản lý tài nguyên đại dương.
2.1 Hệ thống thân vỏ và khung chịu áp lực của AMR dưới nước
Cấu trúc thân của AMR dưới nước được chế tạo từ hợp kim nhôm 7075-T6 hoặc titan cấp 5, chịu áp suất tới 60 MPa, tương đương độ sâu 6.000 m.
Vỏ ngoài phủ lớp epoxy chống ăn mòn và sơn fluoropolymer giảm bám sinh vật biển.
Khung module rời cho phép thay thế cảm biến nhanh trong 15 phút. Độ nổi được điều chỉnh qua ballast điện tử, sai số thể tích ≤ 0,5%.
Các dòng robot AUV cao cấp tích hợp khớp nối đàn hồi, cho phép hấp thu va chạm dưới áp lực dòng chảy mạnh đến 3 m/s.
2.2 Hệ thống động lực và điều hướng
Động cơ chính sử dụng thruster không chổi than BLDC, công suất mỗi cụm 800–1.200 W, có khả năng quay 360° cho điều hướng đa trục.
AMR dưới nước được bố trí 6–8 thruster bố trí theo cấu hình X hoặc vectơ V, tạo khả năng ổn định tư thế pitch, roll và yaw trong phạm vi ±0,2°.
Bộ điều khiển PID tích hợp IMU 9 trục cho phép hiệu chỉnh tức thời khi có sóng hoặc dòng ngược.
Hệ thống quản lý năng lượng tự cân bằng pin, tuổi thọ > 2.000 chu kỳ sạc, an toàn chuẩn IEC 62619.
Nhờ cấu trúc này, robot AUV có thể duy trì vận tốc 2,5–3,2 hải lý/giờ khi khảo sát đáy biển, với thời lượng hoạt động liên tục 30–48 giờ.
2.3 Cảm biến và hệ thống đo đạc
Để phục vụ giám sát môi trường nước và bảo trì công trình ngầm, AMR dưới nước được trang bị nhiều cảm biến chuyên dụng:
- Sonar đa tia (Multibeam Echo Sounder) tần số 200–400 kHz, góc quét 120°, sai số độ sâu ±2 cm.
- Camera 4K HDR chống áp, góc nhìn 170°, tốc độ khung 60 fps.
- Cảm biến DO, pH, độ đục, nhiệt độ và độ mặn, độ chính xác ±0,05 đơn vị.
- Cảm biến áp suất và dòng chảy ADCP (Acoustic Doppler Current Profiler) để đo vận tốc nước ở 100 tầng sâu khác nhau.
Dữ liệu này giúp robot AUV tạo bản đồ 3D đáy biển với độ phân giải 2 cm/pixel, phục vụ chính xác cho khảo sát đáy biển và phát hiện rò rỉ từ hệ thống cáp hoặc ống ngầm.
2.4 Hệ thống định vị và dẫn đường
Định vị là yếu tố cốt lõi của AMR dưới nước. Khi tín hiệu GPS không thể xuyên qua nước, robot sử dụng kết hợp nhiều công nghệ:
- INS (Inertial Navigation System): sai số drift < 0,1% quãng đường.
- DVL (Doppler Velocity Log): đo vận tốc theo đáy biển bằng sóng Doppler 600–1.200 kHz.
- USBL (Ultra Short Baseline): truyền – nhận âm thanh tần số thấp để xác định vị trí tuyệt đối so với trạm nổi.
- Compass số và gyroscope quang học độ chính xác ±0,05°.
Tổ hợp này cho phép robot AUV duy trì độ sai lệch vị trí < 1 m sau quãng đường 10 km, đủ tiêu chuẩn cho bảo trì công trình ngầm và đo đạc địa hình phục vụ dầu khí ngoài khơi.
2.5 Bộ xử lý trung tâm và thuật toán AI
Trái tim của AMR dưới nước là bộ xử lý NVIDIA Jetson AGX Orin hoặc tương đương, hiệu năng 275 TOPS, hỗ trợ GPU TensorCore cho tính toán học sâu (deep learning).
Thuật toán AI xử lý hình ảnh sonar và camera bằng mô hình CNN – YOLOv8 để nhận dạng vật thể, phát hiện rạn san hô, xác định vùng lắng bùn hoặc rò rỉ khí CH₄.
Robot sử dụng kỹ thuật học tăng cường (Reinforcement Learning) để tối ưu đường đi, tiết kiệm 15–20% năng lượng mỗi nhiệm vụ.
Nhờ AI, robot AUV có thể thực hiện khảo sát đáy biển tự động, phát hiện dị thường và gửi cảnh báo ngay lập tức đến trung tâm điều hành.
2.6 Hệ thống truyền thông và đồng bộ dữ liệu
Khi hoạt động dưới nước, AMR dưới nước sử dụng acoustic modem tốc độ 9,6–12 kbps để truyền lệnh, dữ liệu và vị trí về tàu mẹ.
Khi nổi lên, robot tự động chuyển sang kết nối vệ tinh Inmarsat hoặc Starlink tốc độ 10 Mbps để gửi dữ liệu dung lượng lớn (video, bản đồ 3D).
Hệ thống bộ nhớ trong 4 TB SSD lưu toàn bộ log, hình ảnh, dữ liệu cảm biến, đồng thời đồng bộ tự động với máy chủ SCADA trên bờ.
Nhờ cơ chế mã hóa AES-256, toàn bộ dữ liệu giám sát được bảo mật tuyệt đối, đáp ứng yêu cầu quốc phòng và công nghiệp năng lượng biển.
2.7 Cấu hình năng lượng và sạc
Nguồn năng lượng của robot AUV sử dụng pin lithium-ion 20–40 kWh, điện áp danh định 96 V, dòng tối đa 400 A.
Hiệu suất năng lượng đạt 92–95%, có thể hoạt động liên tục 36 giờ ở tốc độ hành trình 3 hải lý/giờ.
Dock sạc dưới nước (Underwater Docking Station) sử dụng cảm ứng từ, công suất 2 kW, thời gian sạc đầy 4–5 giờ.
Khi kết hợp trạm năng lượng nổi chạy bằng năng lượng mặt trời hoặc tuabin sóng, AMR dưới nước có thể hoạt động không gián đoạn trong nhiều tuần, đặc biệt hữu ích cho giám sát môi trường nước vùng xa bờ.
2.8 Hệ thống an toàn và dự phòng
Để đảm bảo vận hành tin cậy trong môi trường khắc nghiệt, AMR dưới nước được thiết kế với nhiều lớp bảo vệ:
- 02 CPU song song hoạt động dự phòng nóng (hot redundancy).
- Van xả khẩn cấp áp suất 10 bar, tự động kích hoạt khi nước lọt vào thân.
- Hệ thống tự nổi khẩn cấp: kích hoạt túi khí 15 lít giúp robot trồi lên mặt biển trong 60 giây.
- Đèn hiệu LED 10.000 lumen và phao định vị AIS để dễ tìm kiếm.
Các tiêu chuẩn an toàn tuân thủ DNVGL-ST-E407 và ISO 13628-6 về thiết bị ngầm tự hành.
2.9 Mô đun công tác và cánh tay thao tác
Để phục vụ bảo trì công trình ngầm, robot AUV có thể gắn thêm cánh tay robot 5–7 bậc tự do, tầm với 1,5 m, lực kẹp 150 N.
Đầu kẹp có thể thay thế bằng dao cắt thủy lực, đầu phun áp lực 300 bar hoặc camera cận cảnh macro.
Mô đun này cho phép thực hiện nhiệm vụ phun sơn chống ăn mòn, gắn cảm biến lên thân ống, hoặc thu mẫu sinh học.
Cảm biến lực – mô men phản hồi theo thời gian thực giúp thao tác chính xác, sai số dưới 2 mm, rất quan trọng khi bảo trì cáp điện hoặc van dầu dưới đáy biển.
2.10 Giao diện điều khiển và phần mềm
Trạm điều khiển trên tàu hoặc trung tâm bờ sử dụng phần mềm ETEK-SubNav Suite, hiển thị giao diện 3D thời gian thực.
Người vận hành có thể theo dõi vị trí, hướng, vận tốc, trạng thái pin, dữ liệu sonar, ảnh video, và mức độ ô nhiễm.
Hệ thống AI hỗ trợ lập kế hoạch nhiệm vụ, gợi ý lộ trình tối ưu để tiết kiệm năng lượng.
Khi mất tín hiệu, AMR dưới nước tự động quay về waypoint gần nhất hoặc nổi lên theo quy trình chuẩn, đảm bảo an toàn tuyệt đối.
2.11 Hệ thống bảo vệ môi trường và quản lý rủi ro
Để phục vụ giám sát môi trường nước, robot AUV có mô-đun cảm biến sinh học phát hiện nồng độ chlorophyll, nitrate và dầu mỏ hòa tan (PAH) trong nước, sai số đo ±1%.
Cảm biến UV-Fluorometer xác định vết dầu loang chỉ ở mức 1 ppb.
Tất cả vật liệu thân vỏ đều tuân thủ tiêu chuẩn RoHS, không chứa kim loại nặng, không phát thải trong suốt vòng đời sử dụng.
Khi vận hành, AMR dưới nước phát tiếng ồn dưới 65 dB re 1 µPa @ 1m, đảm bảo không gây nhiễu hệ sinh thái biển.
2.12 Cấu trúc module và khả năng mở rộng
Thiết kế dạng module cho phép người dùng tùy chọn cấu hình theo nhiệm vụ:
- Mô đun khảo sát địa vật lý (Side Scan Sonar + Sub-bottom Profiler)
- Mô đun bảo trì (Manipulator Arm + Torch + High-Pressure Nozzle)
- Mô đun sinh học (CTD + Fluorometer + DO Sensor)
Nhờ chuẩn kết nối điện – dữ liệu chung (Ethernet subsea connector MCBH8), các mô đun được gắn nhanh trong 5 phút.
Điều này giúp AMR dưới nước linh hoạt khi chuyển đổi giữa khảo sát đáy biển, bảo trì công trình ngầm hoặc giám sát môi trường nước, tối ưu chi phí vận hành và bảo dưỡng.
3.1 Thông số kỹ thuật tổng quan của AMR dưới nước
Bảng sau thể hiện các thông số kỹ thuật tiêu chuẩn của AMR dưới nước dùng cho khảo sát đáy biển và bảo trì công trình ngầm:
| Hạng mục | Thông số | Ghi chú |
| Chiều dài | 2.200 – 3.500 mm | Tùy cấu hình nhiệm vụ |
| Trọng lượng khô | 180 – 320 kg | Bao gồm pin và cảm biến |
| Độ sâu làm việc | Tối đa 6.000 m | Áp suất tới 60 MPa |
| Tốc độ hành trình | 2,5 – 3,2 hải lý/giờ | Tối đa 5 hải lý/giờ khi tăng tốc |
| Thời gian hoạt động | 24 – 48 giờ | Tùy loại pin 20–40 kWh |
| Độ sai lệch định vị | < 1 m/10 km | INS + DVL + USBL kết hợp |
| Pin | Li-ion 96 V – 400 A | Tuổi thọ > 2.000 chu kỳ |
| Thruster | 6–8 BLDC 1,2 kW | Điều khiển vectơ đa trục |
| Vỏ chịu áp | Titan cấp 5 / Nhôm 7075-T6 | Lớp phủ chống ăn mòn |
| Hệ thống định vị | INS, DVL, USBL, Gyro quang học | Sai số hướng ±0,05° |
| Sonar đa tia | 200–400 kHz | Độ phân giải 2 cm/pixel |
| Bộ xử lý | NVIDIA Jetson AGX Orin | Hiệu năng 275 TOPS |
| Bộ nhớ | 4 TB SSD | Ghi log & dữ liệu cảm biến |
| Giao tiếp | Acoustic modem / vệ tinh | 12 kbps – 10 Mbps |
| Cánh tay robot | 5–7 bậc tự do | Lực kẹp 150 N |
| Hệ thống an toàn | Van áp, túi nổi, đèn AIS | Theo chuẩn DNV-ST-E407 |
Các thông số trên là căn cứ đánh giá hiệu suất và độ tin cậy của robot AUV trong môi trường đại dương khắc nghiệt.
3.2 Hiệu suất vận hành thực tế
Trong thử nghiệm tại vùng biển Nha Trang (độ sâu 500 m), AMR dưới nước đạt tốc độ trung bình 2,8 hải lý/giờ, sai số định vị 0,8 m sau quãng đường 12 km.
Thời gian hoạt động liên tục 36 giờ, tiêu thụ năng lượng 0,65 kWh/km, hiệu suất cơ điện đạt 91,3%.
Khả năng truyền dữ liệu sonar thời gian thực qua acoustic modem đạt 10 kbps ở khoảng cách 2.800 m.
Khi giám sát môi trường nước, cảm biến đo pH ±0,03 và DO ±0,05 mg/l, đáp ứng chuẩn đo ISO 5814:2012.
Độ ổn định hướng khi dòng chảy 2,5 m/s vẫn giữ ±0,2°, đảm bảo độ chính xác cao trong bảo trì công trình ngầm.
3.3 Độ tin cậy và bảo trì
AMR dưới nước thiết kế với chỉ số MTBF (Mean Time Between Failure) ≥ 12.000 giờ, nhờ sử dụng linh kiện đạt tiêu chuẩn quân sự MIL-STD-810G.
Các bộ phận dễ hao mòn như thruster, phớt trục và van áp có thời gian thay thế < 20 phút với công cụ chuyên dụng.
Tự động chẩn đoán 45 tham số hoạt động (điện áp, nhiệt độ, độ rung, áp suất nội bộ). Khi vượt ngưỡng, robot tự kích hoạt quy trình “safe mode” hoặc nổi khẩn.
So với ROV dây cáp, chi phí bảo trì của robot AUV giảm 35–40%, thời gian dừng máy dưới 5%.
3.4 Tiêu chuẩn kỹ thuật và chứng nhận quốc tế
Mọi cấu phần của AMR dưới nước đều tuân thủ tiêu chuẩn thiết kế, an toàn và hiệu suất quốc tế:
- DNV-ST-E407: Thiết bị ngầm tự hành.
- ISO 13628-6:2006: Hệ thống can thiệp và bảo trì dưới biển.
- IEC 60529 (IP68): Chống nước và bụi.
- MIL-STD-810H: Độ bền va đập, rung và nhiệt độ.
- RoHS 3 (EU 2015/863): Không chứa kim loại nặng độc hại.
- CE & FCC: Chuẩn thiết bị điện – điện tử xuất khẩu EU/Mỹ.
- ISO 9001:2015 & ISO 14001:2015: Quản lý chất lượng và môi trường trong sản xuất.
Nhờ đáp ứng trọn bộ tiêu chuẩn, robot AUV có thể triển khai trong mọi dự án quốc tế về khảo sát đáy biển và giám sát môi trường nước.
3.5 Tiêu chuẩn môi trường và năng lượng
Trong quá trình vận hành, AMR dưới nước đạt mức phát thải CO₂ gián tiếp < 3 kg/kWh tiêu thụ (tính theo nguồn sạc), thấp hơn 20% so với ROV truyền thống.
Công suất tiêu thụ trung bình 1,1 kW/h, có thể tái sạc bằng năng lượng tái tạo từ phao mặt nước.
Tất cả dầu thủy lực và mỡ bôi trơn đều là loại sinh học (biodegradable oil) đạt tiêu chuẩn OECD 301B, không gây ô nhiễm khi rò rỉ.
Hệ thống làm mát chất lỏng sử dụng glycol-water, vòng tuần hoàn kín, giảm thất thoát năng lượng 10%.
Đây là yếu tố quan trọng trong các nhiệm vụ giám sát môi trường nước dài hạn.
3.6 Tiêu chuẩn đo lường và hiệu chuẩn cảm biến
Các cảm biến trên robot AUV được hiệu chuẩn định kỳ theo tiêu chuẩn quốc tế:
- Sonar đa tia: ISO 17208-2:2016.
- Cảm biến DO, pH: ASTM D6697-17.
- Cảm biến áp suất: IEC 60770-1.
- ADCP: chuẩn USGS OFR 01-01.
Mỗi thiết bị có chứng nhận traceable theo NIST (National Institute of Standards and Technology).
Nhờ đó, dữ liệu từ AMR dưới nước có thể tích hợp trực tiếp vào hệ thống GIS – SCADA toàn cầu, đảm bảo độ tin cậy cho các dự án khảo sát đáy biển hoặc kiểm tra bảo trì công trình ngầm.
3.7 Khả năng tương thích hệ thống và mở rộng
AMR dưới nước hỗ trợ giao thức Modbus TCP/IP, CANOpen và ROS 2.0, giúp dễ dàng kết nối với nền tảng điều khiển ETEK-OceanLink hoặc hệ SCADA sẵn có của khách hàng.
Khi hoạt động theo đội hình (swarm mode), tối đa 10 robot AUV có thể phối hợp nhờ kết nối mạng âm thanh (Underwater Mesh Network) khoảng cách 3 km giữa các robot.
Mỗi đơn vị tự chia vùng khảo sát bằng thuật toán phân vùng Voronoi, đảm bảo không trùng lặp dữ liệu.
Khả năng đồng bộ thời gian qua NTP nội bộ sai số < 1 ms giúp hợp nhất dữ liệu chính xác tuyệt đối khi khảo sát đáy biển.
3.8 Hiệu quả dữ liệu và phân tích sau nhiệm vụ
Dữ liệu thu được từ AMR dưới nước được xử lý bằng phần mềm ETEK-DataMarine AI, áp dụng mô hình học sâu để tái tạo bản đồ đáy biển 3D.
Bản đồ có thể xuất ở định dạng GeoTIFF, LAS, OBJ, hỗ trợ trực tiếp cho phần mềm GIS, CAD và các mô hình CFD.
Khi giám sát môi trường nước, AI phân tích biến động DO, pH, độ đục, và phát hiện bất thường theo thời gian thực.
Kết quả giúp đánh giá chính xác hiện trạng san hô, mức độ xói mòn đáy hoặc ảnh hưởng của dòng hải lưu lên công trình ngầm.
Độ chính xác dữ liệu không gian đạt ±5 cm ở độ sâu 3.000 m.
3.9 Độ an toàn vận hành và khả năng phục hồi sau sự cố
Robot AUV của hệ AMR dưới nước được lập trình 4 tầng an toàn:
- Tầng cảnh báo sớm (Early Warning Layer) phát hiện sự cố áp suất.
- Tầng cô lập (Isolation Layer) khóa nguồn điện và van điều áp.
- Tầng phục hồi (Recovery Layer) kích hoạt túi nổi, gửi tín hiệu AIS.
- Tầng báo cáo (Report Layer) truyền log sự cố qua vệ tinh.
Khi thiết bị mất liên lạc > 30 phút, cơ chế auto-recovery khởi động, robot nổi lên và phát tín hiệu AIS 162 MHz để xác định vị trí.
Cơ chế này bảo đảm 100% khả năng thu hồi trong phạm vi 10 km², giúp duy trì an toàn tuyệt đối cho bảo trì công trình ngầm.
3.10 Chuẩn kết cấu và thiết kế mô-đun
Cấu trúc AMR dưới nước thiết kế theo tiêu chuẩn mô-đun hóa MIL-STD-209K, giúp tháo lắp nhanh trong điều kiện biển.
Khung chịu áp được mô phỏng bằng phần mềm ANSYS, đạt hệ số an toàn (FoS) ≥ 2,2.
Toàn bộ đường ống và khoang điện đạt cấp bảo vệ IP69K, chịu áp lực tia nước 80 bar.
Cáp truyền dữ liệu dùng vật liệu PFA cách điện, chịu nhiệt 200°C, tuổi thọ cơ học > 1 triệu chu kỳ gập.
Thiết kế này đảm bảo robot AUV có thể hoạt động ổn định trong môi trường nước mặn, bùn hoặc vùng có từ trường mạnh.
3.11 Tiêu chuẩn vận hành quốc phòng và nghiên cứu khoa học
Trong lĩnh vực quốc phòng, AMR dưới nước đáp ứng tiêu chuẩn MIL-STD-461G về chống nhiễu điện từ và MIL-S-901D về chịu va đập.
Hệ thống camera quang – hồng ngoại có thể phát hiện vật thể kích thước 10 cm ở khoảng cách 15 m trong nước đục.
Khi dùng cho nghiên cứu khoa học, robot AUV có thể tích hợp cảm biến CTD, fluorometer, turbidity meter để giám sát môi trường nước phục vụ đề án hải dương học.
Độ chính xác đo mặn ±0,02 PSU, nhiệt độ ±0,01°C, cho phép phát hiện biến động khí hậu biển theo thời gian dài.
3.12 Hiệu quả vận hành tổng hợp (OEE)
Chỉ số hiệu quả tổng thể OEE (Overall Equipment Effectiveness) của AMR dưới nước đạt:
- Availability (Khả dụng) ≥ 95,8%
- Performance (Hiệu suất) ≥ 94,6%
- Quality (Chất lượng dữ liệu) ≥ 98,9%
Khi triển khai 10 robot AUV hoạt động song song, năng suất khảo sát tăng 300% so với ROV, trong khi chi phí vận hành giảm 55%.
Độ ổn định dữ liệu đạt mức tương đương các hệ thống khảo sát hải dương quốc tế như Kongsberg HUGIN hoặc Bluefin-21.
Đây là bằng chứng rõ ràng cho khả năng thay thế ROV trong nhiệm vụ khảo sát đáy biển quy mô lớn.
4.1 Lợi ích kỹ thuật của AMR dưới nước
Việc ứng dụng AMR dưới nước giúp nâng cao đáng kể độ chính xác trong khảo sát đáy biển và bảo trì hạ tầng ngầm.
Nhờ hệ thống định vị INS–DVL–USBL tích hợp, sai số vị trí chỉ còn dưới 0,2%, cao hơn 5 lần so với ROV dây cáp.
Cảm biến sonar đa tia 400 kHz tái tạo bản đồ đáy với độ phân giải 2 cm/pixel, giúp kỹ sư đánh giá chi tiết cấu trúc địa tầng.
Độ ổn định hướng ±0,1° và khả năng tự cân bằng giúp robot duy trì quỹ đạo ổn định, giảm thời gian khảo sát 30%.
Cơ chế tự hành thông minh giúp robot AUV điều hướng tối ưu, tiết kiệm 20% năng lượng cho mỗi nhiệm vụ.
4.2 Lợi ích tài chính và tối ưu chi phí vận hành
So với giải pháp ROV truyền thống, chi phí vận hành của AMR dưới nước giảm trung bình 55–60% nhờ loại bỏ dây cáp và giảm nhân lực điều khiển.
Một robot AUV có thể thay thế 3–4 ROV trong cùng khu vực, tiết kiệm chi phí nhân công trực tiếp lên đến 200.000 USD/năm.
Chi phí nhiên liệu tàu hỗ trợ giảm 35% nhờ thời gian khảo sát rút ngắn.
Với vòng đời pin 2.000 chu kỳ, thời gian hoàn vốn trung bình 24 tháng, trong khi ROV cần 4–5 năm.
Khả năng tự bảo trì và cập nhật phần mềm qua IoT giúp giảm 40% chi phí bảo dưỡng định kỳ.
4.3 Lợi ích về an toàn và nhân lực
AMR dưới nước giúp loại bỏ hoàn toàn nhu cầu thợ lặn làm việc trong điều kiện nguy hiểm: áp suất cao, tầm nhìn kém, dòng chảy mạnh.
Các thao tác bảo trì công trình ngầm được thực hiện bằng cánh tay robot 7 bậc tự do, sai số < 2 mm, an toàn tuyệt đối.
Nhờ hoạt động tự động, robot giảm thiểu rủi ro con người bị nhiễm độc khí H₂S, CH₄ hoặc sự cố điện cao áp trong vùng cáp ngầm.
Khi phát hiện nguy cơ, robot AUV tự động rút khỏi vùng nguy hiểm và phát cảnh báo về trung tâm SCADA trong 3 giây.
Đây là bước tiến lớn trong an toàn lao động và giảm tai nạn công nghiệp dưới nước.
4.4 Lợi ích về chất lượng dữ liệu và quản lý dự án
AMR dưới nước cung cấp dữ liệu đồng bộ từ sonar, camera, cảm biến và DVL, tất cả được hiệu chỉnh theo cùng tọa độ INS.
Khi khảo sát đáy biển, sai số dữ liệu độ sâu chỉ ±2 cm, tọa độ địa lý ±0,8 m, đáp ứng chuẩn khảo sát DNV-GL.
Tất cả dữ liệu được lưu trên nền tảng ETEK-OceanCloud, truy cập 24/7, đảm bảo đồng bộ giữa đội kỹ thuật, nhà đầu tư và cơ quan quản lý.
Dữ liệu có thể tái sử dụng để mô phỏng CFD, FEM hoặc phục vụ thiết kế công trình biển.
Độ toàn vẹn dữ liệu đạt 99,98%, loại bỏ hoàn toàn hiện tượng thiếu mảnh hoặc trùng lớp bản đồ.
4.5 Lợi ích môi trường và phát triển bền vững
AMR dưới nước được thiết kế thân thiện môi trường với tiếng ồn dưới 65 dB re 1 µPa @1m, thấp hơn 30% so với ROV thông thường, không ảnh hưởng sinh vật biển.
Toàn bộ dầu thủy lực là loại phân hủy sinh học, không gây rò rỉ độc hại.
Hệ thống tái sạc năng lượng tái tạo (dock năng lượng mặt trời và sóng biển) giúp giảm 15% lượng điện tiêu thụ trên bờ.
Khi thực hiện giám sát môi trường nước, robot thu thập dữ liệu DO, chlorophyll, nitrate, turbidity để theo dõi ô nhiễm, phục vụ cảnh báo sớm.
Việc sử dụng robot AUV giúp loại bỏ 100% nguy cơ rò rỉ dầu từ tàu khảo sát diesel, giảm phát thải CO₂ tới 200 tấn/năm.
4.6 Ứng dụng AMR dưới nước trong khảo sát đáy biển
Trong ngành địa vật lý và hải dương học, AMR dưới nước trở thành công cụ không thể thiếu.
Nhờ sonar đa tia và máy quét địa tầng (Sub-bottom Profiler 3–12 kHz), robot có thể lập bản đồ cấu trúc đáy sâu 100 m dưới lớp trầm tích.
Độ phân giải ngang 2 cm, dọc 5 cm, giúp xác định vị trí hang rỗng, đứt gãy địa chất, hoặc tuyến cáp chôn sâu.
Trong dự án khảo sát đáy biển ngoài khơi Bình Thuận, 3 robot AUV hoàn thành bản đồ 30 km² chỉ trong 48 giờ, nhanh gấp 4 lần phương pháp sonar kéo.
Dữ liệu đạt chuẩn IHO SP-44 Order 1A, sẵn sàng cho thiết kế tuyến ống dầu khí hoặc công trình điện gió.
4.7 Ứng dụng trong bảo trì công trình ngầm
AMR dưới nước có vai trò cốt lõi trong kiểm tra, bảo dưỡng ống dẫn dầu, cáp điện, móng trụ và neo giàn khoan.
Cánh tay robot AUV có thể gắn đầu phun áp lực 300 bar để làm sạch rong, cặn hoặc sơn chống ăn mòn.
Camera macro 4K cùng laser đo khoảng cách 1 mm cho phép xác định độ mòn thành ống ±0,1 mm.
Trong các dự án bảo trì công trình ngầm, robot giúp giảm thời gian kiểm tra ống dài 100 km từ 14 ngày xuống 5 ngày.
Báo cáo tự động xuất dạng 3D CAD, kèm log định vị và hình ảnh, giúp kỹ sư đưa ra quyết định nhanh và chính xác.
4.8 Ứng dụng trong giám sát môi trường nước
Đối với các cơ quan môi trường và viện nghiên cứu, AMR dưới nước là công cụ đo đạc lý tưởng.
Cảm biến DO, pH, turbidity, nitrate và fluorometer ghi nhận dữ liệu mỗi giây, dung sai ±0,05.
Robot có thể lặn tuần hoàn 200 lần/ngày, quét khu vực 10 km², gửi dữ liệu thời gian thực về trung tâm.
Trong các dự án giám sát môi trường nước ở vịnh Hạ Long, robot AUV phát hiện vùng ô nhiễm dầu sớm hơn 48 giờ so với phương pháp lấy mẫu thủ công.
Điều này giúp cơ quan quản lý chủ động ứng phó, giảm thiểu thiệt hại sinh thái và bảo vệ hệ sinh thái biển.
4.9 Ứng dụng trong năng lượng và dầu khí
Trong ngành năng lượng ngoài khơi, AMR dưới nước đảm nhận nhiệm vụ khảo sát, định vị và theo dõi rò rỉ dầu hoặc khí từ giàn khoan.
Robot trang bị cảm biến CH₄ và H₂S độ nhạy 1 ppm, phát hiện tức thời sự cố, gửi cảnh báo qua vệ tinh trong 10 giây.
Khi khảo sát tuyến ống dài 150 km, robot AUV ghi lại bản đồ 3D độ chính xác ±5 cm, hỗ trợ bảo dưỡng định kỳ.
Việc triển khai robot giúp giảm 60% chi phí kiểm tra so với tàu ROV, đồng thời đảm bảo an toàn tuyệt đối cho nhân sự trên giàn khoan.
Kết quả phân tích hỗ trợ quản lý tài sản (Asset Integrity Management) theo tiêu chuẩn API RP 2D.
4.10 Ứng dụng trong lĩnh vực quốc phòng và an ninh biển
Trong lĩnh vực quốc phòng, AMR dưới nước được sử dụng để dò mìn, trinh sát và bảo vệ tuyến hàng hải.
Nhờ sonar độ phân giải cao và AI nhận dạng vật thể, robot AUV có thể phát hiện vật thể kim loại nhỏ 10 cm ở khoảng cách 15 m.
Khi kết hợp đội hình 5 robot, hệ thống có thể quét khu vực 25 km² chỉ trong 6 giờ, giúp xác định mìn từ tính hoặc tàu chìm.
Dữ liệu truyền mã hóa AES-256 đảm bảo an toàn chiến thuật.
Khả năng hoạt động im lặng (silent mode) dưới 50 dB giúp AMR dưới nước ẩn khỏi radar và sonar chủ động, thích hợp cho nhiệm vụ bí mật.
4.11 Ứng dụng trong năng lượng tái tạo biển
Trong ngành điện gió ngoài khơi, AMR dưới nước được dùng để khảo sát móng trụ, cáp ngầm và theo dõi lắng cát quanh chân móng.
Cảm biến sonar side-scan 900 kHz tái tạo hình dạng trụ, giúp đánh giá độ ổn định nền móng.
Robot đo dòng chảy và độ đục xung quanh tuabin, hỗ trợ tối ưu vị trí đặt trụ mới.
Trong dự án điện gió Kê Gà, 2 robot AUV của ETEK hoàn thành kiểm tra 32 trụ trong 72 giờ, độ lệch đo < 2 cm.
Giải pháp này tiết kiệm 45% chi phí khảo sát, đồng thời cung cấp dữ liệu 3D phục vụ bảo trì định kỳ.
4.12 Giá trị chiến lược cho doanh nghiệp và quốc gia
Việc triển khai AMR dưới nước mang lại giá trị chiến lược:
- Giảm phụ thuộc vào công nghệ nhập khẩu, tăng năng lực tự chủ công nghiệp biển.
- Xây dựng cơ sở dữ liệu hải dương học chuẩn hóa, phục vụ quy hoạch không gian biển quốc gia.
- Tạo lợi thế cạnh tranh cho doanh nghiệp trong chuỗi cung ứng dầu khí và năng lượng tái tạo.
Theo thống kê, doanh nghiệp ứng dụng robot AUV đạt mức tăng năng suất khảo sát trung bình 40%, lợi nhuận biên tăng 18–20%/năm.
Đây là xu thế tất yếu của chuyển đổi số trong lĩnh vực đại dương học và khai thác biển sâu.
5.1 Giải pháp trọn gói – từ thiết kế đến triển khai AMR dưới nước
ETEK cung cấp giải pháp AMR dưới nước theo mô hình EPC toàn diện: khảo sát, thiết kế, sản xuất, lắp đặt, vận hành, đào tạo và bảo trì.
Khách hàng chỉ cần một đầu mối duy nhất, loại bỏ rủi ro phân tán khi làm việc với nhiều nhà cung cấp.
Tất cả các dòng robot AUV của ETEK được tùy chỉnh theo yêu cầu dự án: từ khảo sát đáy biển độ sâu 6.000 m đến bảo trì công trình ngầm phức tạp.
Giải pháp tích hợp phần mềm ETEK-OceanCloud, lưu trữ và phân tích dữ liệu trên nền tảng điện toán đám mây, giúp doanh nghiệp quản lý toàn bộ nhiệm vụ dưới biển theo thời gian thực.
ETEK đảm bảo khả năng bàn giao thiết bị “ready-to-dive” chỉ sau 90 ngày.
5.2 Công nghệ quốc tế – bảo chứng hiệu suất vận hành
Các hệ thống AMR dưới nước của ETEK được sản xuất theo chuẩn công nghệ châu Âu, sử dụng linh kiện từ Đức, Nhật và Na Uy.
Khung thân titan cấp 5, thruster Đức BLDC 1,2 kW, sonar Kongsberg 400 kHz, định vị DVL Nortek 1200 kHz, và bộ xử lý NVIDIA Jetson AGX Orin 275 TOPS.
Nhờ tích hợp công nghệ AI, robot AUV tự tối ưu đường di chuyển, giảm 20% năng lượng, kéo dài tuổi thọ pin thêm 25%.
Các mô hình của ETEK đạt chứng nhận DNV-ST-E407, MIL-STD-810H, ISO 13628-6 và CE.
Khi khảo sát đáy biển, độ sai lệch vị trí < 0,8 m, chất lượng dữ liệu 98,9%, vượt tiêu chuẩn khảo sát quốc tế IHO Order 1A.
Công nghệ này giúp ETEK dẫn đầu thị trường trong lĩnh vực robot biển thông minh.
5.3 Dịch vụ kỹ thuật và hậu mãi toàn diện
ETEK thiết lập trung tâm hỗ trợ kỹ thuật 24/7 tại cảng Vũng Tàu và Hải Phòng, sẵn sàng phản ứng trong 12 giờ kể từ khi khách hàng yêu cầu.
Khi AMR dưới nước gặp sự cố, hệ thống IoT giám sát từ xa tự động gửi log đến trung tâm kỹ thuật ETEK, cho phép chẩn đoán và khắc phục lỗi phần mềm ngay lập tức.
Với sự hỗ trợ của công nghệ bảo trì dự đoán (Predictive Maintenance), robot AUV có thể phát hiện sớm 90% nguy cơ hỏng hóc cơ khí.
Kho phụ tùng luôn sẵn sàng, đảm bảo thay thế trong 24–48 giờ, giảm thời gian dừng hoạt động xuống dưới 2%.
ETEK không chỉ bảo hành thiết bị mà còn bảo hành năng suất và chất lượng dữ liệu thu được trong mọi dự án giám sát môi trường nước hoặc dầu khí.
5.4 Tùy chỉnh linh hoạt theo nhu cầu và quy mô dự án
ETEK cung cấp nhiều cấu hình AMR dưới nước đáp ứng mọi quy mô hoạt động:
- AUV Compact 1500: nhỏ gọn, phục vụ giám sát môi trường nước ven bờ, độ sâu 1.500 m.
- AUV Industrial 3000: chuyên cho bảo trì công trình ngầm và tuyến ống dầu khí, độ sâu 3.000 m.
- AUV DeepSea 6000: phục vụ khảo sát đáy biển sâu, độ sâu 6.000 m, pin 40 kWh, thời gian hoạt động 48 giờ.
Khách hàng có thể tùy chọn mô đun cảm biến, cánh tay robot, hoặc dock sạc tự động.
ETEK cũng hỗ trợ tích hợp API mở, giúp kết nối với nền tảng phân tích dữ liệu sẵn có của khách hàng, tạo nên hệ sinh thái robot linh hoạt, dễ mở rộng.
5.5 Giá trị khác biệt so với đối thủ cạnh tranh
So với các nhà cung cấp khác, AMR dưới nước của ETEK nổi bật ở 5 điểm:
- Đồng bộ công nghệ – từ phần cứng, cảm biến, đến phần mềm quản lý đều do ETEK phát triển.
- Chi phí hợp lý – chỉ bằng 60–70% so với sản phẩm châu Âu, nhưng hiệu suất tương đương.
- Hậu mãi nội địa – kỹ sư Việt Nam được đào tạo bởi chuyên gia Na Uy, bảo trì nhanh và chính xác.
- Tích hợp AI toàn diện – robot AUV học và tối ưu qua từng nhiệm vụ, nâng hiệu suất OEE > 95%.
- An toàn và thân thiện môi trường – vật liệu RoHS, dầu sinh học, không phát thải CO₂ trong vận hành.
Trong dự án khảo sát đáy biển điện gió ngoài khơi Phan Thiết, ETEK triển khai 4 robot hoạt động liên tục 96 giờ, ghi nhận 15 TB dữ liệu địa vật lý với độ chính xác ±3 cm – thành tích vượt chuẩn quốc tế.
5.6 Đảm bảo hiệu quả kinh tế và phát triển bền vững
Lựa chọn AMR dưới nước của ETEK giúp doanh nghiệp đạt đồng thời ba mục tiêu: hiệu quả – an toàn – bền vững.
Hiệu suất khai thác dữ liệu tăng 40%, chi phí vận hành giảm 55%, trong khi thời gian triển khai rút ngắn 30%.
Mỗi robot AUV giúp giảm 200 tấn CO₂/năm so với ROV truyền thống, góp phần thực hiện mục tiêu “Net Zero 2050”.
ETEK cam kết hỗ trợ chiến lược chuyển đổi số toàn diện cho ngành biển: kết nối dữ liệu giám sát, dự báo hư hỏng và phân tích xu hướng môi trường biển.
Hệ thống AMR của ETEK đã được triển khai tại các dự án quốc tế về bảo trì công trình ngầm và giám sát môi trường nước, khẳng định vị thế Việt Nam trong chuỗi công nghiệp đại dương toàn cầu.
Kết luận
Trong thời đại công nghiệp biển thông minh, AMR dưới nước không chỉ là thiết bị mà là nền tảng công nghệ giúp doanh nghiệp làm chủ đại dương.
Với khả năng khảo sát đáy biển, giám sát môi trường nước, và bảo trì công trình ngầm chính xác, nhanh chóng, ETEK cung cấp giải pháp toàn diện từ thiết kế – sản xuất – vận hành – phân tích dữ liệu.
Chọn ETEK là chọn một đối tác công nghệ đáng tin cậy, sở hữu giải pháp tự hành tiên tiến, dịch vụ chuyên nghiệp và cam kết hiệu quả lâu dài cho mọi dự án dưới biển.