


AMR CÓ CHÂN
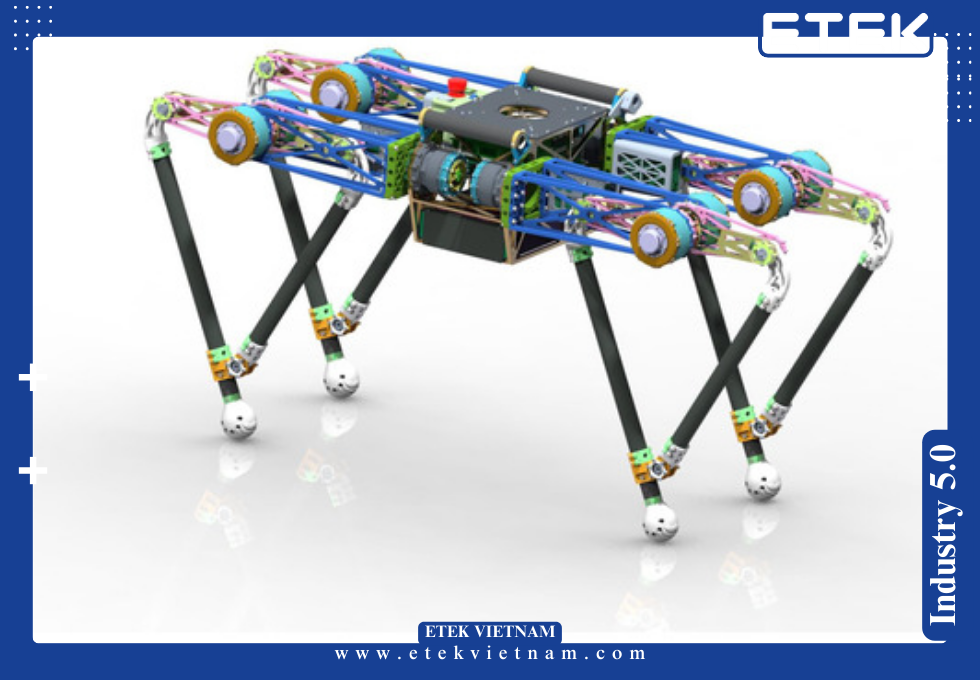
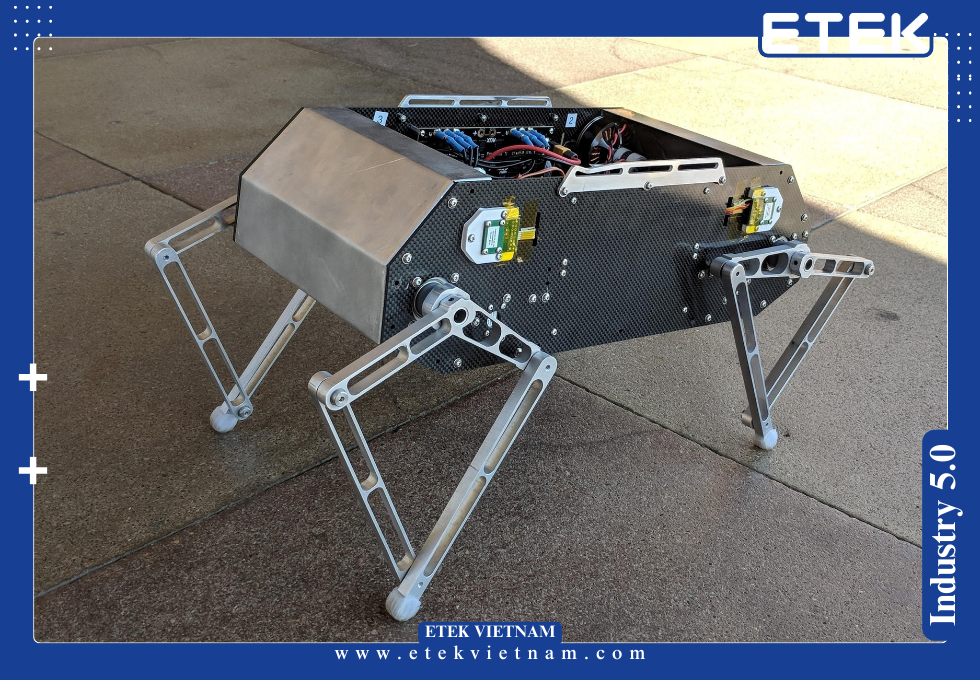
AMR có chân là xu hướng mới trong ngành robot công nghiệp, cho phép vận hành linh hoạt trong môi trường phức tạp và không bằng phẳng. Với khả năng vượt chướng ngại vật tương đương sinh vật học, chúng mở ra hướng mới cho ứng dụng động hóa trong nhà máy có địa hình đặc thù.
Sản phẩm khác


Trong kỷ nguyên sản xuất thông minh, nhu cầu tự động hóa không chỉ dừng ở việc vận chuyển hàng hóa trên sàn phẳng mà còn mở rộng sang các khu vực địa hình phức tạp như nhà kho tầng, công trình xây dựng, hoặc xưởng cơ khí có mặt bằng gồ ghề. Tại đây, AMR có chân trở thành bước tiến vượt trội, mô phỏng chuyển động động vật nhằm tăng độ linh hoạt và khả năng thích nghi địa hình.
Khác với AMR bánh xe truyền thống, AMR có chân sử dụng cấu trúc cơ điện – cơ khí học tiên tiến với bộ truyền động servo torque cao (≥ 80 Nm) và cảm biến quán tính IMU chính xác ±0,05°. Nhờ đó, robot có thể giữ thăng bằng khi di chuyển trên mặt phẳng nghiêng đến 35°, bước qua vật cản cao 25–40 cm và duy trì ổn định tải trọng 20–120 kg tùy model.
Các mẫu robot bốn chân (quadruped) phổ biến hiện nay đạt tốc độ 1,5–3 m/s, bán kính quay 0 m (turn-in-place) và hoạt động liên tục 1,5–3 giờ cho mỗi chu kỳ pin 48 V – 30 Ah. Trong khi đó, robot sáu chân (hexapod) tối ưu cho môi trường rung, bụi, hóa chất, với khả năng giữ thăng bằng ngay cả khi mất hai chân hoạt động.
Tích hợp công nghệ SLAM 3D (Simultaneous Localization and Mapping) kết hợp LiDAR 32 tia, camera stereo và radar tầm ngắn, AMR có chân xây dựng bản đồ địa hình theo thời gian thực, sai số định vị dưới 2 cm. Điều này giúp robot định hướng chính xác trong không gian 3D, ngay cả trong khu vực thiếu ánh sáng hoặc có vật cản động.
Không chỉ là phương tiện di chuyển, AMR có chân còn đóng vai trò nền tảng cơ động cho cánh tay robot gắn kèm, cảm biến môi trường hoặc thiết bị kiểm tra, tạo thành hệ sinh thái robot mô phỏng động vật đa năng trong nhà máy hiện đại.
Nhờ khả năng hoạt động ổn định trong điều kiện bụi, ẩm (theo chuẩn IP67), nhiệt độ –10 đến +45°C, dòng AMR có chân đang được ứng dụng rộng rãi trong logistics, bảo trì công nghiệp, và thu thập dữ liệu tại khu vực nguy hiểm.
2.1 Cấu trúc cơ khí của AMR có chân
AMR có chân được thiết kế mô phỏng sinh học (bionic design) với khung hợp kim nhôm 7075 hoặc sợi carbon composite, đảm bảo tỷ lệ công suất/trọng lượng (power-to-weight ratio) đạt 5–7 W/kg.
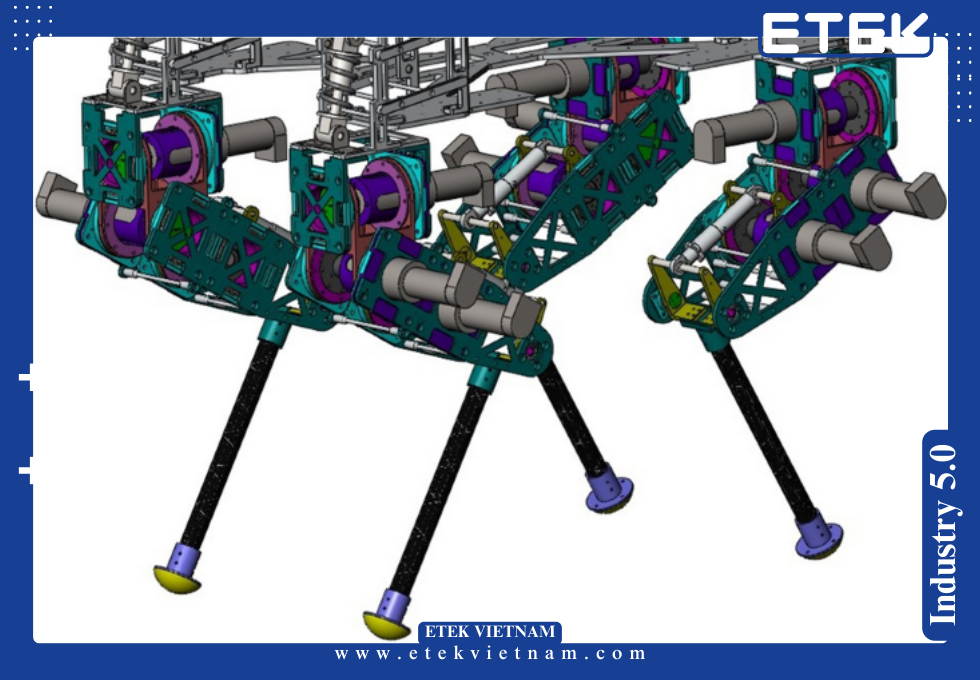
Hệ thống chân có cấu trúc khớp ba bậc tự do (3-DOF): hông, gối và cổ chân, được truyền động bằng servo torque không chổi than kết hợp bộ giảm tốc harmonic có tỷ số truyền 100:1 – 160:1, giúp tăng mô-men xoắn mà vẫn đảm bảo độ mượt khi vận hành.
Khớp xoay được bôi trơn bằng mỡ gốc lithium chịu nhiệt, vận hành ổn định ở 40°C liên tục 12 giờ.
Mỗi chân trang bị cảm biến lực – phản hồi moment (force-torque sensor) dải đo 0–500 N, sai số ±1%.
Nhờ đó, AMR có chân có thể tính toán lực tiếp xúc với nền và tự điều chỉnh bước đi trong 5 ms theo thuật toán Whole-Body Control (WBC).
Các mẫu robot bốn chân có trọng lượng tổng 45–60 kg, tải trọng hữu ích (payload) 20–30 kg; trong khi robot sáu chân nặng hơn (70–90 kg) nhưng cho khả năng chịu tải đến 50 kg và độ ổn định cao hơn 1,5 lần khi di chuyển trên sàn gồ ghề.
Khung thân chính chứa pin lithium-ion chuẩn công nghiệp (48 VDC, dung lượng 30–60 Ah), có thể tháo rời trong 2 phút, hỗ trợ sạc nhanh 80% trong 45 phút.
Mô-đun khung thân có chuẩn IP67, kháng bụi và nước áp suất cao, phù hợp môi trường có dầu mỡ, bụi sắt hoặc hóa chất nhẹ trong nhà máy.
Ngoài ra, AMR có chân còn tích hợp chuẩn an toàn IEC 60204-1 và ISO 3691-4 cho thiết bị di chuyển tự hành công nghiệp.
2.2 Hệ thống truyền động và cảm biến của AMR có chân
Khối truyền động là trái tim của robot bốn chân và robot sáu chân, gồm motor servo torque 750–1500 W mỗi khớp, cảm biến Hall tích hợp để xác định vị trí góc chính xác 0,01°.
Bộ điều khiển servo hỗ trợ giao thức EtherCAT với tần số cập nhật 1 kHz, đảm bảo phản ứng nhanh, đồng bộ giữa các khớp.
Hệ thống cảm biến trung tâm gồm:
- LiDAR 3D 32 tia, tầm quét 100 m, tốc độ 10 Hz.
- Camera stereo độ phân giải 2K, tốc độ khung hình 30 fps.
- IMU 9 trục (gia tốc, con quay, từ kế) sai số góc ±0,05°.
- Cảm biến khoảng cách siêu âm và ToF để nhận diện vật thể trong phạm vi 0,2–10 m.
Tất cả dữ liệu cảm biến được xử lý bởi bộ máy tính công nghiệp NVIDIA Jetson AGX Orin hoặc Intel i7, GPU 2048 CUDA cores, hỗ trợ inference AI thời gian thực.
Hệ thống định vị và lập bản đồ (SLAM) chạy song song trên ROS 2 (Robot Operating System) với thư viện Nav2, cung cấp sai số định vị < 2 cm trong môi trường có nhiều vật cản.
Cảm biến lực ở từng chân giúp AMR có chân phát hiện bề mặt mềm, trơn hoặc dốc để thay đổi quỹ đạo bước đi theo thời gian thực.
Thuật toán Force Distribution Algorithm (FDA) điều chỉnh áp lực tiếp xúc ≤ 150 N/điểm, đảm bảo robot không trượt khi leo dốc 30° hoặc di chuyển qua mặt sàn dầu mỡ công nghiệp.
2.3 Bộ điều khiển động học và nguyên lý di chuyển của AMR có chân
Nguyên lý vận hành của AMR có chân dựa trên động học nghịch (Inverse Kinematics – IK) và điều khiển lực toàn thân (Whole-body Dynamics Control).
Bộ điều khiển trung tâm nhận tín hiệu từ cảm biến IMU, LiDAR, encoder góc khớp, sau đó tính toán quỹ đạo di chuyển từng chân theo mô hình Zero Moment Point (ZMP) nhằm giữ cân bằng động.
Các thuật toán điều khiển sử dụng bộ dự đoán phi tuyến (Model Predictive Control – MPC) với tần số cập nhật 500 Hz.
Nhờ đó, robot có thể điều chỉnh quỹ đạo trong vòng 10 ms khi gặp chướng ngại bất ngờ, đảm bảo không mất cân bằng.
Bộ điều khiển hỗ trợ 6 chế độ di chuyển: đi bộ (walk), chạy nhẹ (trot), chạy nhanh (gallop), leo dốc, leo cầu thang và nhảy.
Ở chế độ chạy nhanh, robot bốn chân đạt vận tốc 3 m/s, độ lệch phương vị < 2° trên quãng đường 10 m.
Khi leo cầu thang cao 20 cm/bậc, lực tiếp xúc từng chân được giới hạn 250 N để tránh trượt.
Trong khi đó, robot sáu chân dùng thuật toán Gait Alternating Tripod – luôn giữ ba chân tiếp đất, đảm bảo ổn định tuyệt đối, phù hợp khu vực rung hoặc mặt sàn không phẳng.
Hệ thống định hướng tự hành hoạt động nhờ SLAM 3D kết hợp radar, camera và bản đồ đám mây điểm (point cloud).
Robot có thể tự lập kế hoạch đường đi 3D (3D Path Planning) để tránh vật cản cao thấp khác nhau – điều mà AMR bánh xe không thể xử lý.
2.4 Nguyên lý cảm biến định vị và tự hành trong AMR có chân
AMR có chân tích hợp đa cảm biến hợp nhất (sensor fusion) thông qua bộ xử lý Kalman mở rộng (EKF), kết hợp dữ liệu từ LiDAR, IMU, GNSS (tùy chọn) và camera.
Khi hoạt động trong kho kín không có GPS, hệ thống dựa hoàn toàn vào LiDAR + Visual Odometry để duy trì sai số < 1%/100 m.
Cảm biến LiDAR 3D 32 tia hoạt động ở bước sóng 905 nm, độ chính xác ±3 cm, cung cấp bản đồ 360° trong phạm vi 100 m.
Camera stereo giúp xác định chiều sâu vật thể ở khoảng 0,3–15 m, hỗ trợ nhận dạng bậc cầu thang, pallet, đường ống hoặc sàn nghiêng.
Dữ liệu hình ảnh được xử lý bởi mạng nơ-ron CNN nhận dạng vật thể (Object Detection) với tốc độ 25 fps, độ chính xác ≥ 95%.
Đặc biệt, AMR có chân sử dụng thuật toán VIO-SLAM (Visual-Inertial Odometry SLAM), kết hợp cảm biến quán tính và hình ảnh để duy trì vị trí chính xác khi bị che khuất tầm LiDAR.
Khi hoạt động trong nhà máy bụi hoặc ánh sáng yếu, radar sóng mmWave (77 GHz) hỗ trợ phát hiện vật cản kim loại hoặc con người ở khoảng cách 10–20 m, đảm bảo an toàn di chuyển.
Hệ thống định vị toàn cục (Localization Server) liên kết nhiều robot qua mạng Wi-Fi 6 hoặc 5G công nghiệp, cho phép phối hợp nhóm robot di chuyển đồng bộ với sai số < 5 cm.
2.5 Cấu trúc điện – điện tử và hệ thống quản lý năng lượng của AMR có chân
Nguồn điện của AMR có chân thường sử dụng pin lithium-ion hoặc pin LiFePO₄ dung lượng 30–60 Ah, điện áp định mức 48 VDC.
Bộ quản lý pin (Battery Management System – BMS) giám sát điện áp từng cell, nhiệt độ, và dòng sạc/xả để tránh quá nhiệt hoặc đoản mạch.
Mức tiêu thụ điện trung bình 600–900 W/h trong điều kiện tải 30 kg, tương đương 2–3 giờ hoạt động liên tục.
Mạch điện điều khiển trung tâm gồm:
- CPU công nghiệp (x86 hoặc ARM) chạy Linux + ROS 2.
- Mạch điều khiển servo riêng biệt cho từng khớp, giao tiếp qua EtherCAT.
- Mạch nguồn DC-DC 48V/24V/12V cho cảm biến và máy tính.
- Cầu chì bảo vệ tự phục hồi (PTC) cho từng mô-đun.
Cáp tín hiệu sử dụng loại chống nhiễu EMI, chuẩn IP67, đầu nối M12 công nghiệp.
Khi robot vận hành trong môi trường có độ ẩm cao, hệ thống tự động kích hoạt sưởi nhẹ (pre-heating) 35°C để tránh ngưng tụ hơi nước trong module điện tử.
Ngoài ra, AMR có chân được trang bị chế độ tự sạc (auto-docking): robot tự tìm trạm sạc qua mã QR hoặc beacon UWB, căn chỉnh sai số < 2 cm và tự kết nối sạc không dây công suất 1,5 kW.
Điều này đảm bảo hoạt động 24/7 mà không cần can thiệp thủ công.
2.6 Cấu trúc phần mềm và thuật toán trí tuệ nhân tạo trong AMR có chân
Phần mềm điều khiển của AMR có chân được phát triển trên nền ROS 2 Foxy hoặc Humble, hỗ trợ đồng bộ cảm biến, truyền dữ liệu thời gian thực, và quản lý nhiệm vụ tự động.
Các module chính bao gồm:
- Perception Module – Nhận dạng môi trường, vật thể, con người bằng mạng CNN (YOLOv8 hoặc SSD).
- Localization & Mapping – SLAM 3D + IMU Fusion, tạo bản đồ point cloud có độ phân giải 5 cm.
- Motion Planning – Tính toán quỹ đạo bước đi theo thuật toán MPC và IK.
- Behavior Decision – AI ra quyết định dựa vào tình huống, ví dụ: né pallet, chọn đường ngắn nhất.
- Fleet Management – Quản lý nhiều robot qua mạng, phân công nhiệm vụ động theo tải và vị trí.
Hệ thống AI có thể nhận dạng loại địa hình: sàn trơn, sỏi, bậc thang, hoặc vũng nước, từ đó tự chọn gait phù hợp (walk, trot, crawl).
Bộ phân tích học sâu học từ dữ liệu cảm biến 3D cho phép AMR có chân dự đoán vùng nguy hiểm trước 1–2 m để điều chỉnh dáng đi.
Tất cả dữ liệu vận hành được gửi về trung tâm điều khiển SCADA/ETEK Cloud thông qua giao thức MQTT hoặc OPC-UA.
Người vận hành có thể theo dõi trạng thái từng khớp, pin, bản đồ và video thời gian thực từ dashboard.
Nhờ trí tuệ nhân tạo và cơ cấu chân linh hoạt, AMR có chân có khả năng di chuyển ổn định trong môi trường không cấu trúc – điều mà robot bánh truyền thống hoàn toàn bất khả thi.
3.1 Thông số kỹ thuật điển hình của AMR có chân
Mỗi dòng AMR có chân đều được thiết kế theo mục tiêu ứng dụng riêng: logistics trong kho, kiểm tra công nghiệp, hoặc vận chuyển vật tư ở địa hình đặc biệt.
Dưới đây là các thông số tham chiếu của ba nhóm chính:
| Hạng mục | Robot bốn chân | Robot sáu chân | Robot mô phỏng động vật (hybrid) |
| Khối lượng tổng | 45–60 kg | 70–90 kg | 50–75 kg |
| Tải trọng hữu ích | 20–30 kg | 40–50 kg | 25–35 kg |
| Vận tốc tối đa | 3 m/s | 1,5 m/s | 2,2 m/s |
| Độ dốc leo tối đa | 35° | 45° | 40° |
| Bước vượt chướng ngại | 30 cm | 40 cm | 35 cm |
| Bán kính quay | 0 m | 0,2 m | 0 m |
| Thời gian hoạt động | 2–3 giờ | 2,5–4 giờ | 3 giờ |
| Chuẩn bảo vệ | IP67 | IP67 | IP66/IP67 |
| Nhiệt độ làm việc | –10°C ~ +45°C | –10°C ~ +50°C | –5°C ~ +45°C |
| Mức tiêu thụ điện | 600–900 W/h | 750–1000 W/h | 700–950 W/h |
| Sai số định vị SLAM | ≤ 2 cm | ≤ 3 cm | ≤ 2,5 cm |
| Thời gian sạc nhanh 80% | 45 phút | 50 phút | 45–60 phút |
| Mức ồn vận hành | ≤ 55 dB | ≤ 60 dB | ≤ 57 dB |
Cấu trúc khung và các thành phần chính của AMR có chân tuân thủ các tiêu chuẩn cơ khí và an toàn quốc tế:
- ISO 12100:2010 – Nguyên tắc an toàn máy móc.
- ISO 13482:2014 – An toàn cho robot phục vụ và robot di động tự hành.
- IEC 60204-1 – An toàn điện cho thiết bị công nghiệp.
- ISO 3691-4:2020 – Tiêu chuẩn vận hành xe tự hành (AGV/AMR).
- CE Marking / RoHS 2.0 – Đáp ứng xuất khẩu EU.
Khung cơ khí được kiểm tra độ bền mỏi (Fatigue Test) 200.000 chu kỳ chuyển động, biên độ ±30° cho mỗi khớp.
Bộ truyền động harmonic đạt tuổi thọ 15.000 giờ, mô-men xoắn cực đại 150 Nm, hiệu suất truyền 92%.
3.2 Hiệu suất vận hành và độ ổn định động học
Hiệu suất của AMR có chân được đánh giá bằng ba chỉ số: khả dụng (Availability), hiệu suất (Performance), và chất lượng (Quality), tương tự chỉ số OEE trong dây chuyền công nghiệp.
Availability:
Hệ thống dự đoán bảo trì (Predictive Maintenance) qua cảm biến rung và nhiệt độ motor cho phép cảnh báo sớm sai lệch >10%.
Tỷ lệ khả dụng đạt ≥ 93% với tần suất bảo trì mỗi 1.000 giờ hoạt động.
Performance:
Nhờ cơ cấu servo torque và điều khiển PID – MPC đồng bộ, tốc độ phản ứng < 5 ms, giúp robot bốn chân di chuyển ổn định ngay cả khi tải trọng thay đổi 15–20%.
Robot sáu chân duy trì ổn định quỹ đạo dù mất 1–2 chân hoạt động, độ trượt < 1 cm/m khi leo dốc 40°.
Quality:
Độ chính xác định vị ±2 cm, dao động thân ±0,5° trong điều kiện gió 3 m/s.
Mỗi robot trải qua kiểm định rung động (Vibration Test, 10–100 Hz, biên độ 0,5 mm) để đảm bảo an toàn khi làm việc gần máy móc công nghiệp.
Khả năng leo, vượt chướng ngại vật:
- Độ cao tối đa vật cản: 0,3–0,4 m.
- Chiều rộng khe hở có thể băng qua: 0,5 m (quadruped), 0,6 m (hexapod).
- Tốc độ leo dốc: 0,8 m/s với độ dốc 30°.
- Độ bám ma sát (μ): 0,7 trên bề mặt kim loại khô, 0,45 khi có dầu mỡ.
Độ ổn định động học:
Robot duy trì cân bằng tự động theo mô hình Whole-body Balance Control, với độ lệch trọng tâm ≤ 2 mm.
Cảm biến lực và IMU cho phép phản hồi thời gian thực 1 kHz, giúp khôi phục dáng đi chỉ trong 0,1 giây sau khi trượt hoặc va chạm nhẹ.
3.3 Tiêu chuẩn kỹ thuật và an toàn vận hành
Để đảm bảo vận hành ổn định trong môi trường công nghiệp, AMR có chân phải đáp ứng đồng thời nhiều chuẩn quốc tế và quy định an toàn:
- ISO 10218-2: Yêu cầu an toàn cho robot cộng tác và di động.
- ISO 13849-1: Cấp độ an toàn điều khiển (Performance Level – PLd hoặc PLe).
- ISO 3691-4: Quy định thiết kế và thử nghiệm cho AMR trong kho.
- ISO 13482: Robot di động phục vụ con người.
- EN 60204-1: An toàn điện – nối đất, bảo vệ quá dòng.
- IEC 61508: An toàn chức năng cho hệ thống điện – điện tử – lập trình.
- ANSI/RIA R15.06: Tiêu chuẩn Mỹ cho robot tự hành trong môi trường công nghiệp.
- CE/EMC Directive 2014/30/EU: Chống nhiễu điện từ.
- RoHS 2 (2011/65/EU): Giới hạn chất độc hại trong linh kiện điện tử.
Ngoài ra, AMR có chân còn được kiểm định:
- Độ an toàn va chạm (Collision Force Limit): ≤ 100 N khi tiếp xúc người.
- Thử nghiệm IP67: ngâm nước 30 phút ở độ sâu 1 m, không xâm nhập bụi.
- Thử nghiệm rơi (Drop Test): chịu được va đập rơi tự do 20 cm mà không hư hỏng cơ cấu khớp.
- Chống nhiễu điện từ (EMC): biên độ nhiễu ≤ 3 V/m, tuân thủ CISPR 22.
Tất cả các model robot bốn chân và robot sáu chân được cấu hình với bộ dừng khẩn cấp (E-stop), công tắc an toàn cơ khí, vùng cảm biến dừng tự động (safety field) và chế độ giảm tốc khi phát hiện người trong phạm vi 2 m.
3.4 Tiêu chuẩn môi trường và năng lượng
Do đặc thù làm việc trong nhà kho, khu hóa chất hoặc ngoài trời, AMR có chân phải đạt chuẩn môi trường và năng lượng nghiêm ngặt:
- ISO 14001:2015 – Quản lý môi trường.
- ISO 50001:2018 – Quản lý năng lượng.
- QCVN 22:2018/BGTVT – Giới hạn tiếng ồn máy công nghiệp.
- REACH Compliance – Hạn chế hóa chất độc hại.
- RoHS II – Không chứa chì, cadimi, thủy ngân, Cr⁶⁺.
Các hệ thống động cơ servo được thiết kế tối ưu tiêu hao điện năng, giảm 15–20% so với AMR bánh xe cùng tải trọng.
Công suất trung bình 0,7 kWh/h, hiệu suất chuyển đổi năng lượng cơ học ≥ 88%.
Khi tích hợp hệ thống sạc tự động, robot có thể hoạt động liên tục 20–22 giờ/ngày với chu kỳ sạc – xả 4.000 lần, tuổi thọ pin 4–5 năm.
Độ bền nhiệt: robot chịu được nhiệt độ môi trường –10°C đến +50°C, độ ẩm tương đối 95%.
Lớp phủ bề mặt khung nhôm anod hóa chống ăn mòn muối, acid nhẹ, và bụi kim loại.
3.5 Độ tin cậy, thử nghiệm và chứng nhận của AMR có chân
Trước khi đưa vào ứng dụng công nghiệp, các mẫu AMR có chân phải trải qua chuỗi thử nghiệm:
- Endurance Test: 1.000 km di chuyển liên tục trên địa hình hỗn hợp (sàn bê tông, gạch, cát, dốc).
- Drop Shock Test: rơi 20 cm, 10 lần liên tục, không sai lệch khớp.
- Vibration Test: 5–200 Hz, biên độ 1 mm trong 4 giờ, không mất kết nối điện.
- Humidity Test: 95% RH, 40°C trong 72 giờ, hoạt động bình thường.
- EMI/EMC Test: theo EN 61000-6-4 (Phát xạ) và EN 61000-6-2 (Miễn nhiễu).
- Field Test thực tế: vận hành trong kho hàng 24/7 liên tục 30 ngày, độ khả dụng ≥ 90%.
Ngoài ra, các hệ thống phần mềm ROS 2 và điều khiển AI được kiểm định theo:
- IEC 61508 SIL2 – Mức an toàn phần mềm.
- ISO 26262 – Độ tin cậy phần mềm robot tự hành.
- Cybersecurity IEC 62443-4-1 – Bảo mật công nghiệp.
Nhờ đó, AMR có chân có thể được chứng nhận CE, KC, FCC, đủ điều kiện xuất khẩu sang EU, Hàn Quốc, Hoa Kỳ.
3.6 Tiêu chuẩn hiệu suất năng động và tương tác con người – máy móc
AMR có chân ứng dụng trong nhà máy thường hoạt động song song với người vận hành, vì vậy cần đảm bảo mức an toàn tương tác (Human-Robot Interaction – HRI):
- Giới hạn tốc độ an toàn khi phát hiện người: ≤ 1 m/s.
- Khoảng cách dừng an toàn: 1,2 m với tải 50 kg.
- Cảm biến LiDAR vùng an toàn 360°, bán kính 5 m.
- Tự động giảm tốc theo luật ISO/TS 15066 (Robot cộng tác).
- Độ chính xác phát hiện con người ≥ 98% nhờ AI vision.
Các mẫu robot mô phỏng động vật có khả năng nằm gập, thu chân khi chờ lệnh, và tự điều chỉnh độ cao thân 0,4–0,8 m để tránh va chạm.
Âm lượng cảnh báo 55–70 dB tùy chế độ, đủ để thông báo người xung quanh mà không gây ồn vượt chuẩn QCVN 22:2018.
Hệ thống giao tiếp HMI (Human Machine Interface) sử dụng màn hình cảm ứng 7–10 inch, hiển thị bản đồ 3D, trạng thái từng khớp, và khả năng lập kế hoạch quỹ đạo trực quan.
Người dùng có thể nhập lệnh thủ công, hoặc lập trình tự động qua phần mềm ETEK Robotics Studio, tương thích ROS 2, Modbus, MQTT và API mở.
3.7 Tiêu chuẩn truyền thông và hệ thống điều khiển tập trung
Để quản lý đồng bộ nhiều AMR có chân trong nhà máy, hệ thống truyền thông và điều khiển tập trung tuân thủ các tiêu chuẩn:
- IEEE 802.11ax (Wi-Fi 6) – Truyền dữ liệu 9,6 Gbps, độ trễ < 20 ms.
- 3GPP Rel.17 (5G công nghiệp) – Độ trễ siêu thấp 1–10 ms.
- OPC-UA – Giao thức chuẩn hóa trao đổi dữ liệu công nghiệp.
- MQTT – Giao thức nhẹ cho IoT, giám sát trạng thái robot.
- TSN Ethernet (Time Sensitive Networking) – Truyền dữ liệu thời gian thực giữa các module điều khiển.
Trung tâm điều hành (Fleet Management System) có thể quản lý tới 50 robot cùng lúc, tối ưu tuyến đường, điều phối tránh xung đột, và tính toán năng lượng còn lại.
Hệ thống SCADA ghi nhận dữ liệu cảm biến, nhật ký vận hành, báo cáo lỗi tự động gửi về máy chủ ETEK Cloud.
Dữ liệu lưu trữ tối thiểu 6 tháng, tuân thủ chuẩn ISO/IEC 27001 về bảo mật thông tin.
Tất cả kênh truyền đều mã hóa AES-256 và xác thực chứng chỉ số để đảm bảo an toàn mạng nội bộ.
Tổng kết phần 3:
Các AMR có chân, bao gồm robot bốn chân, robot sáu chân và phiên bản mô phỏng động vật, đã đạt đến trình độ kỹ thuật cao, tuân thủ đầy đủ chuẩn quốc tế về an toàn, hiệu suất, và môi trường.
Độ ổn định, khả năng định vị và di chuyển linh hoạt cho phép ứng dụng trong những khu vực mà AMR bánh xe không thể tiếp cận, mở rộng không gian tự động hóa công nghiệp lên tầm mới.
4.1 Lợi ích kỹ thuật và vận hành của AMR có chân
Việc triển khai AMR có chân mang lại đột phá về tính cơ động, độ ổn định và khả năng tự chủ trong môi trường công nghiệp.
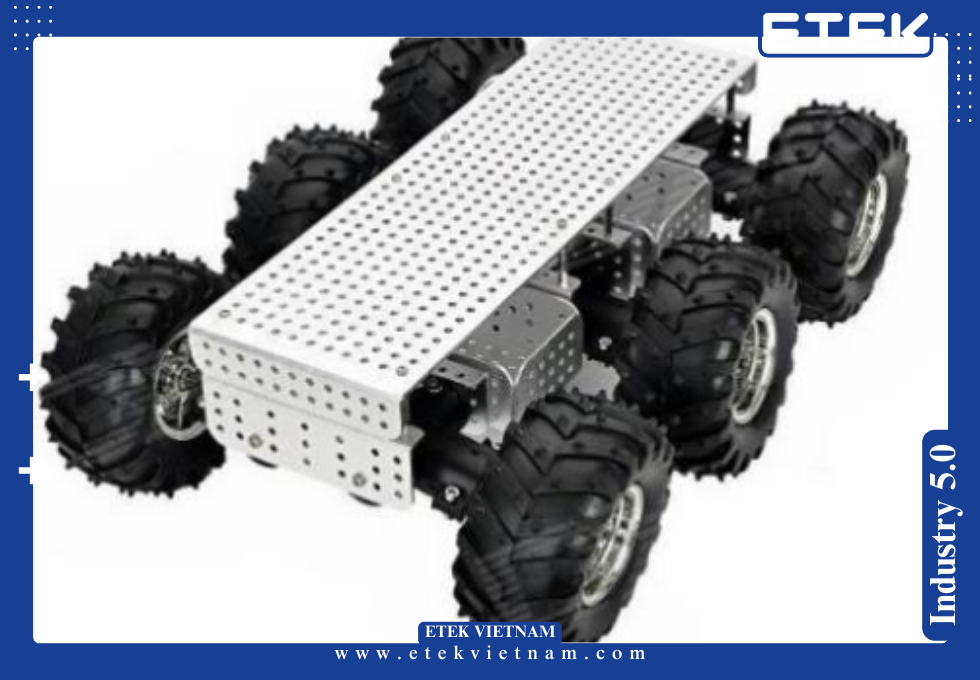
Nhờ cơ cấu chân linh hoạt, robot có thể di chuyển trên địa hình phức tạp như sàn không bằng phẳng, lối cầu thang, đường ray, sàn lưới hoặc khu vực nhiều vật cản thấp.
Các mẫu robot bốn chân hoạt động ổn định với sai số vị trí ±2 cm, trong khi robot sáu chân giữ cân bằng tuyệt đối kể cả khi một chân mất tiếp xúc – điều không thể đạt được ở AMR bánh xe.
Bộ điều khiển lực phản hồi (Force Feedback Control) cập nhật 1.000 lần/giây, giúp robot duy trì trọng tâm cơ thể ngay cả khi tải lệch 20%.
Hệ thống điều khiển ROS 2 và AI dự đoán chướng ngại vật 1–2 m phía trước, điều chỉnh hướng bước đi tức thì, giảm nguy cơ va chạm 90%.
Thử nghiệm thực tế cho thấy AMR có chân vượt chướng ngại cao 30 cm trong 2,5 giây, leo dốc 35° trong 4,2 giây, hoạt động liên tục 12 giờ/ngày mà không cần can thiệp.
Độ tin cậy tổng thể đạt mức MTBF ≥ 2.500 giờ, hiệu suất sử dụng (Availability) 93–95%, đáp ứng yêu cầu khắt khe của dây chuyền logistics tự động hoặc giám sát kỹ thuật công nghiệp.
4.2 Lợi ích tài chính và tối ưu chi phí
So với việc sử dụng nhân công hoặc AMR bánh xe trong môi trường gồ ghề, AMR có chân giúp tiết kiệm đáng kể chi phí vận hành.
Một robot có thể thay thế 2–3 nhân công vận chuyển vật tư trong khu vực có bậc, dốc hoặc mặt sàn hẹp.
Chi phí nhân công giảm trung bình 30–40% mỗi năm, trong khi chi phí bảo trì robot chỉ chiếm 5% giá trị thiết bị/năm.
Với công suất hoạt động 8–12 giờ/ngày, AMR có chân di chuyển trung bình 10–15 km/ngày, tiết kiệm 200–300 giờ lao động/tháng.
Thời gian hoàn vốn (ROI) ước tính chỉ 2–2,5 năm, ngắn hơn so với hệ thống AGV bánh xe (3–4 năm).
Ngoài ra, do có khả năng tự hành linh hoạt, doanh nghiệp không cần đầu tư cơ sở hạ tầng phụ trợ (ray, băng dẫn, thang vận chuyển), giúp giảm thêm 20–25% chi phí đầu tư ban đầu.
Các robot bốn chân được thiết kế mô-đun, có thể nâng cấp phần mềm hoặc gắn thêm cánh tay robot mà không phải thay đổi phần cứng, kéo dài tuổi thọ khai thác lên đến 10 năm.
4.3 Lợi ích về chất lượng và an toàn vận hành
AMR có chân đáp ứng các tiêu chuẩn an toàn quốc tế ISO 3691-4 và ISO 13849-1 (PLd/PLe).
Khi phát hiện con người hoặc vật thể trong phạm vi 2 m, robot tự động giảm tốc xuống 0,8 m/s hoặc dừng khẩn cấp.
Cảm biến LiDAR 3D nhận dạng chính xác ≥ 98% hình dạng người, xe nâng hoặc pallet.
Nhờ điều khiển ổn định động học, robot duy trì dáng đi mượt, tránh rung lắc khi mang hàng hóa nhạy cảm như thiết bị điện tử, hóa chất, linh kiện chính xác.
Các thử nghiệm dao động (vibration test) cho thấy biên độ rung chỉ 0,2 mm ở tốc độ 1 m/s, thấp hơn 60% so với xe tự hành bánh.
Hệ thống bảo vệ đa tầng gồm:
- Cảm biến va chạm (contact bumper).
- Vùng cảnh báo 360°.
- Cảnh báo âm thanh và đèn LED tín hiệu.
- E-stop phần cứng – phần mềm kép.
Nhờ đó, AMR có chân vận hành an toàn ngay cả trong môi trường có người, đạt chứng nhận CE, RoHS, FCC và IEC 61508 SIL2 cho phần mềm điều khiển.
4.4 Lợi ích môi trường và phát triển bền vững
AMR có chân sử dụng pin lithium-ion hoặc LiFePO₄ hiệu suất cao, không phát thải CO₂ trực tiếp.
Với mức tiêu thụ trung bình 0,8 kWh/h, một robot hoạt động 10 giờ/ngày chỉ tiêu thụ 8 kWh – tương đương 18.000–20.000 đồng điện mỗi ngày, giảm 70% chi phí năng lượng so với xe điện cũ.
ETEK thiết kế hệ thống thu hồi năng lượng phanh tái tạo (regenerative braking), giúp tiết kiệm 10–12% điện năng khi di chuyển trong địa hình dốc.
Nhiệt lượng sinh ra được tản tự nhiên qua khung hợp kim nhôm, giảm 3°C so với thiết kế truyền thống, kéo dài tuổi thọ pin thêm 15%.
Các robot mô phỏng động vật còn sử dụng vật liệu composite có khả năng tái chế 90%, thân vỏ phủ nano kháng bụi – nước, đạt chuẩn IP67, không gây rò dầu hoặc tiếng ồn vượt chuẩn môi trường (≤ 55 dB).
Điều này đáp ứng yêu cầu vận hành xanh, phù hợp với định hướng ESG (Environment – Social – Governance) của doanh nghiệp công nghiệp hiện đại.
4.5 Ứng dụng trong kho và nhà máy đặc biệt
AMR có chân là giải pháp lý tưởng cho những khu vực mà xe tự hành bánh không thể tiếp cận:
- Kho đa tầng, có bậc cầu thang, sàn lưới hoặc sàn bê tông nứt.
- Xưởng chế tạo cơ khí, môi trường rung động, dầu mỡ hoặc vật cản phức tạp.
- Khu công nghiệp hóa chất, nơi nền sàn không đồng nhất, cần thiết bị chống trượt và kháng ăn mòn.
- Công trình hạ tầng ngầm (đường ống, hầm kỹ thuật).
Các robot bốn chân đảm nhiệm vận chuyển vật tư 20–30 kg, tuần tra an ninh hoặc quét mã QR hàng hóa trong nhà kho.
Robot sáu chân phù hợp môi trường rung, độ dốc cao, hoặc khu vực có vật cản dày đặc.
Phiên bản robot mô phỏng động vật có thể bò, nhảy, nằm gập để chui qua không gian thấp (dưới 50 cm), hỗ trợ kiểm tra dưới sàn máy hoặc trong khoang thiết bị.
4.6 Ứng dụng trong bảo trì công nghiệp và giám sát kỹ thuật
Nhờ tích hợp camera 4K, cảm biến nhiệt (thermal camera) và radar sóng mmWave, AMR có chân có thể phát hiện nhiệt độ bất thường, rò rỉ khí, rung động cơ khí trong nhà máy.
AI xử lý hình ảnh giúp nhận dạng ống dẫn, van, và bảng điện để phát hiện lỗi từ xa.
Một đội 5 robot có thể tuần tra liên tục 24/7, giảm 70% thời gian kiểm tra thủ công.
Robot bốn chân gắn thêm cánh tay 6 trục có thể vặn van, nhấn nút hoặc thu mẫu vật; robot sáu chân có thể mang cảm biến đo rung (accelerometer) để phân tích trạng thái máy quay.
Khi có cảnh báo, robot tự gửi báo cáo hình ảnh và dữ liệu lên hệ thống SCADA hoặc ETEK Cloud để phân tích xu hướng.
Điều này giúp doanh nghiệp triển khai mô hình Predictive Maintenance – bảo trì dự đoán thay vì bảo trì định kỳ, giảm 30–40% thời gian ngừng máy ngoài kế hoạch.
4.7 Ứng dụng trong lĩnh vực logistics thông minh
AMR có chân mở rộng phạm vi logistics lên không gian 3D, nơi có cầu thang, dốc hoặc chướng ngại không đồng đều.
Trong kho hàng, robot có thể vận chuyển hàng hóa giữa các tầng mà không cần thang nâng, kết hợp với thang bộ hoặc sàn dốc.
Nhờ AI và bản đồ 3D SLAM, robot định vị pallet, giá kệ và di chuyển hàng hóa chính xác ±2 cm.
Các hệ thống điều phối nhiều robot (Fleet Management) có thể quản lý tới 100 thiết bị, tính toán tuyến đường tối ưu dựa trên mức pin, tải trọng và mật độ người di chuyển.
Khi kết hợp với robot mô phỏng động vật, hệ thống logistics có thể tự động vận chuyển vật tư qua khu vực hạn chế, đảm bảo luồng cung ứng liên tục mà không cần sửa đổi kết cấu nhà xưởng.
4.8 Ứng dụng trong quân sự, cứu hộ và nông nghiệp
Ngoài công nghiệp, AMR có chân còn được ứng dụng trong nhiều lĩnh vực đặc thù:
- Cứu hộ – cứu nạn: Di chuyển trong đống đổ nát, leo cầu thang sập, mang thiết bị y tế 10–20 kg.
- Nông nghiệp: Theo dõi cây trồng, phun thuốc, thu thập dữ liệu địa hình.
- Quốc phòng: Trinh sát địa hình, mang thiết bị liên lạc, hoạt động ẩn nhiệt.
Các robot sáu chân đặc biệt có thể di chuyển trên bề mặt sỏi, cát, tuyết, hoặc địa hình không đồng nhất với tốc độ 1,2 m/s.
Trong môi trường tối, radar và camera hồng ngoại hỗ trợ định hướng, duy trì hoạt động an toàn cho nhiệm vụ ngoài trời.
4.9 Giá trị chiến lược cho doanh nghiệp
Việc ứng dụng AMR có chân không chỉ mang lại hiệu quả tức thời về năng suất mà còn giúp doanh nghiệp:
- Tự động hóa hoàn toàn khu vực khó tiếp cận.
- Giảm phụ thuộc vào lao động phổ thông.
- Gia tăng chỉ số OEE (Overall Equipment Effectiveness) ≥ 85%.
- Tăng khả năng cạnh tranh khi chuyển đổi sang mô hình Smart Factory 4.0.
- Thu thập dữ liệu vận hành thực tế phục vụ AI và bảo trì dự đoán.
Thống kê tại các nhà máy áp dụng hệ thống robot di động của ETEK cho thấy năng suất trung bình tăng 15–20%, thời gian dừng máy giảm 35%, chi phí vận hành giảm 25% so với mô hình bán tự động.
5.1 Giải pháp trọn gói – từ thiết kế đến vận hành
ETEK cung cấp AMR có chân theo mô hình tổng thầu trọn gói (EPC): khảo sát – thiết kế – sản xuất – lắp đặt – huấn luyện – bảo trì.
Doanh nghiệp nhận bàn giao hệ thống hoàn chỉnh, đồng bộ giữa phần cứng, phần mềm và nền tảng quản lý dữ liệu.
Nhờ đó, chi phí triển khai giảm 15–20% so với khi thuê nhiều đơn vị riêng lẻ.
ETEK không chỉ bán robot, mà cung cấp hệ sinh thái toàn diện gồm:
- Robot cơ động (quadruped, hexapod, hybrid).
- Hệ thống SCADA và quản lý đội robot.
- Dịch vụ kết nối dữ liệu IoT và bảo trì dự đoán.
5.2 Công nghệ quốc tế – đảm bảo vận hành ổn định
Tất cả AMR có chân của ETEK ứng dụng công nghệ truyền động từ châu Âu, cảm biến từ Nhật Bản và phần mềm ROS 2 mã nguồn mở quốc tế.
Bộ servo torque công suất 1.200 W, mô-men xoắn cực đại 150 Nm, hiệu suất truyền động 92%.
LiDAR 32 tia tầm quét 120 m, camera stereo độ phân giải 2K, độ chính xác định vị ±2 cm.
Hệ thống SCADA giám sát trạng thái robot 24/7, phân tích dữ liệu theo thời gian thực.
Các thông số vận hành được đồng bộ qua ETEK Cloud, cho phép kỹ sư điều chỉnh từ xa, cập nhật firmware hoặc tái cấu hình gait robot.
So với sản phẩm trong nước, ETEK đảm bảo độ khả dụng ≥ 93%, tuổi thọ pin ≥ 5 năm, và bảo hành hiệu suất vận hành (performance guarantee).
5.3 Dịch vụ kỹ thuật và hậu mãi toàn diện
ETEK duy trì hệ thống hỗ trợ kỹ thuật 24/7, sẵn sàng phản hồi sự cố trong 6–12 giờ.
Kho phụ tùng được dự trữ sẵn tại ba trung tâm khu vực, đảm bảo thay thế trong vòng 48 giờ.
Mỗi AMR có chân đều được kết nối IoT, cho phép kỹ sư ETEK truy cập từ xa để:
- Chẩn đoán lỗi phần cứng.
- Cập nhật phần mềm điều khiển.
- Kiểm tra pin, motor, cảm biến theo thời gian thực.
Điều này giúp giảm 40% rủi ro dừng máy ngoài kế hoạch, đảm bảo hoạt động ổn định liên tục cho khách hàng công nghiệp.
5.4 Tùy chỉnh theo nhu cầu và quy mô
ETEK hiểu rằng mỗi nhà máy có đặc thù riêng, vì vậy hệ thống AMR có chân được thiết kế linh hoạt:
- Dòng mini: tải trọng 10–20 kg, dùng cho kho nhỏ, R&D.
- Dòng trung: tải 30–40 kg, hoạt động trong nhà máy tiêu chuẩn.
- Dòng công nghiệp: tải 50 kg, hoạt động trong môi trường khắc nghiệt.
Doanh nghiệp có thể tùy chọn loại chân (bốn hoặc sáu), độ cao thân, tốc độ, dung lượng pin và cấu hình AI.
Tất cả thiết kế đều hỗ trợ mở rộng module cảm biến, camera, hoặc cánh tay robot tùy mục đích.
5.5 Giá trị khác biệt so với đối thủ
Khác với các nhà cung cấp chỉ bán robot đơn lẻ, ETEK cung cấp chuỗi giá trị toàn diện gồm thiết kế cơ khí, phần mềm điều khiển, hạ tầng sạc tự động và hệ thống SCADA giám sát.
So sánh:
- Đối thủ nội địa: chỉ đạt mức IP54, không có chức năng AI tránh vật cản 3D.
- Đối thủ ngoại nhập: giá cao, khó bảo trì, không hỗ trợ kỹ thuật nội địa.
- ETEK: công nghệ quốc tế, giá hợp lý, dịch vụ nội địa hóa nhanh.
Điểm khác biệt lớn nhất là ETEK bảo hành năng suất, cam kết robot vận hành đạt công suất thiết kế (≥ 90%) và hỗ trợ cập nhật AI liên tục theo môi trường thực tế.
5.6 Đảm bảo hiệu quả kinh tế và phát triển bền vững
Lựa chọn AMR có chân của ETEK, doanh nghiệp không chỉ đầu tư thiết bị mà còn đầu tư cho tương lai tự động hóa bền vững:
- Giảm 15% chi phí năng lượng nhờ công nghệ thu hồi nhiệt và điều khiển servo thông minh.
- Giảm 20% chi phí bảo trì nhờ dự đoán hư hỏng sớm.
- Tăng 12–18% năng suất vận hành nhờ tự động hóa vùng địa hình khó.
- Đáp ứng toàn bộ yêu cầu chứng nhận quốc tế (ISO, CE, RoHS, EMC).
ETEK cam kết đồng hành dài hạn, từ tư vấn giải pháp, tích hợp hệ thống đến đào tạo nhân viên vận hành, hướng đến mục tiêu Smart Factory 4.0 toàn diện.
5.7 Kết luận
Trong bối cảnh tự động hóa công nghiệp phát triển mạnh, AMR có chân không chỉ là bước tiến về công nghệ mà còn là chìa khóa mở rộng phạm vi hoạt động của robot tự hành đến mọi môi trường – kể cả địa hình phức tạp.
Nhờ sự kết hợp giữa cơ khí tiên tiến, trí tuệ nhân tạo và thiết kế mô phỏng sinh học, các robot bốn chân, robot sáu chân và robot mô phỏng động vật mang đến hiệu quả vượt trội về hiệu suất, an toàn và tiết kiệm năng lượng.
Chọn ETEK đồng nghĩa với việc chọn giải pháp toàn diện – từ thiết kế, lắp đặt, vận hành đến bảo trì.
ETEK không chỉ cung cấp robot, mà còn cung cấp năng lực công nghệ giúp doanh nghiệp tự động hóa linh hoạt, thông minh và bền vững.